前回までのあらすじ
「スマート望遠鏡」の元祖、UnistellarのeQuinox2を購入したが、マニュアルが貧弱で設定の仕方や使用方法がよくわからず困っていた。少しずつ情報をかき集め、自分で失敗を繰り返しつつ前に進み、ようやく最初の観測(First Light)まで辿り着いた顛末を記録している。前回は望遠鏡とiPad/iPhoneをWiFiで接続し、遠隔操作を開始する寸前まで辿り着いた。
今回は、いよいよ望遠鏡の調整作業に取り掛かり、最初の観測まで一気に辿り着きたい。
最初の観測までにやるべき調整作業は3つある。
(1)ダークフレームの取得 (2)バーティノフマスクを用いた焦点調整 (3) 光軸調整
光軸調整は出荷時にやってあるそうなので、最初はいじらなくても大丈夫だと思う。とはいえ、いずれはやらねばならないし、初期不良ということもあるから、後でその概略だけでもおさらいしておこう。
ちなみに、ガイドブックには光軸調整が最初に登場するのだが、そこには「前のセクションで説明した(バーティノフマスクによる)ピント合わせでどうにもならなくなったら(光軸調整をやってくれ)」と書かれている。最初の説明なので「前のセクション」は当然存在しない。(普通の人は)「どこ?なんのこと?」といった具合に困惑することになるだろう。我慢して説明を読み進めると、バーティノフマスクによる焦点調整は(前ではなく)後ろのセクションに書かれていた.....。このように、このガイドブックの内容は結構めちゃくちゃなのである。おそらくは原稿に推敲が入っていないのではないか?似たようなチグハグな記述はガイドブックのあちこちに散見される。「このマニュアルはもしかして使えないかな...」と多くの人に思わせてしまう、最大の要因となっているのではないか?これはAIを使った直訳翻訳が失敗しているな、と感じる時以上に、なにか深刻な「ダメさ」をこのガイドブックには感じる(たぶん日本人のスタッフが雇われてないと思われる)。
(1)ダークフレームの取得
まずは「ダークフレームの取得」であるが、最初にやるべき作業なのに、なぜかテクニカルガイドブックの後ろの方に書かれている(「観測のコツ」のセクションにある)。おそらく開発者の頭の中ではこの調整は「あまり重要ではないこと」という位置づけになっているのかもしれないが、日本の利用者の多くが最初にこの調整をやっているようである。ダークフレームの取得は室内に望遠鏡が置いてある段階で実施できるので、操作の練習も兼ねて、むしろ最初にやっておくべきだろう。
ここでもマニュアルの不備を指摘しておこう。そもそも「ダークフレーム」という言葉はアプリには登場しない。「センサーのキャリブレーション」というボタンが用意されていて、それが「ダークフレームの取得」に対応している。一方で、ガイドブックでは、タイトルとしては「センサーのキャリブレーション」とあり、カッコ付きで「ダークフレーム」と但し書きの感じで書かれている。それにもかかわらず、それ以降の文書では全て「ダークフレーム」と書かれていて、初心者は大いに困惑することになる。私だったら逆に「ダークフレーム(センサーの調整)」と書き始めて、後ろの文章では「ダークフレーム」を使い続ける文体にすると思う。Unistellarの担当者はこのガイドブックの改訂を真剣に検討していただきたい。
さて、ダークフレーム(センサーのキャリブレーション)とはいったい何なのか?Unistellarのスマート望遠鏡の出力はiPadに向けて送られるので、観測した画像情報はデジタル化されることになる。天体画像のデジタル化はデジタルカメラと同じ要領で行われる。つまり、画像素子と呼ばれる半導体を利用した光子検出である。この半導体デバイスの作動原理は、ヘルツが発見しアインシュタインが理論的説明を与えた「光電効果」という物理現象に基づいている。つまり、太陽光パネルを用いた発電と同様の原理で作動するデバイスである。
光子を補足した半導体では電流が発生するが、これは半導体に含まれる電子-空孔対が光子のエネルギーで分解されることで生成される。この電流を光の到来を示す信号とみなしてエレクトロニクス部分が検出し、そのピクセル(光素子)をデジタル処理して画像を生成するのがデジタルカメラの原理である。Unistellarの望遠鏡もこのしくみを利用して、天体からの光学情報(つまり星や銀河の姿)をデジタル画像情報に変換している。
しかしながら、電子-空孔対は熱エネルギーを受け取った場合にも分解してしまう場合がある。このとき、光が到達していないのに「光信号」が発生してしまい、偽の画像が生成されてしまう。これは熱電流とか熱揺らぎとよばれ、「ノイズ」と同じものである(画像の「雑音」のようなもの)。
デジタルカメラの画像素子に採用されている方式として有名なのがCCD光素子であるが、CCDを用いた精密天体観測では液体窒素で素子を冷やして観測するなど、冷却システムを導入してまで熱電流を抑制しようとする。一方で、熱揺らぎの強度(つまり偽電流の強度)は統計を取って調べれば大体理論的に推測することが可能で、どのピクセルの検出結果が偽情報になっているか見当がつく。その情報を基に素子の感度を適度に減少させることで、熱電子の認識をソフトウェア的に処理し、偽情報を低減することができる。この後者の方法に対応するのが「ダークフレームの取得」である。
ちなみに、eQuinoxの画像素子はCCDではなく、SONYのCMOSセンサーIMX347を利用している。これについては後で触れる。
ダークフレームの取得の手順としては、(1)まず望遠鏡の鏡筒に蓋をかぶせて光が望遠鏡に入らないようにする。この「真っ暗な状態」で光素子が反応したとすれば、それは熱電流によるものであるから、そういう類の電流は画像として処理しないようにプログラムを「教育」するのである。このプロセスはアプリの(2)「センサーのカリブレーション」ボタンを押すことで起動することができる。1-2分でこの処理は終わる。センサーのカリブレションは
設定セクション(ホーム画面の右上の6角形アイコン) > My天体望遠鏡
の手順で辿り着くことができる。このボタンを押した後の状態を下の図に示した。

(この図ではすでに開始されているが)
カリブレーションモードに入ると、次のような画面になる。

ここで一つ文句を言っておこう。これまで、アプリの画面やガイドブックで「キャリブレーション」とカタカナで表現してきたのに、その実行ボタン(画面の下)を見ると「較正」と日本語訳に代わっている。理学部や工学部で教育を受けた人なら、「較正」が「キャリブレーション」(あるいはカリブレーション)に対応することは知っているだろうが、一般の人は知らない可能性が高いと思う(そもそも「較正」の読み方だって知らない人が多いだろう)。ここは「キャリブレーション開始」に統一するべきだろう。
かく言う私もこの画面でしばらくぼうっとしてしまい、「較正」ボタンを押す前にたっぷり5分は無駄にしてしまった。「あ、このボタンを押さないとキャリブレーションが始まらないのか」と気づいたのはその後のことである。(ちなみに、キャリブレーションという発音はフランス人である開発者がフランス語を念頭に翻訳したからではないだろうか?イギリス英語の場合にはカリブレーションと書くのが普通である。またアメリカ英語の場合には、ニューヨークなどの東海岸ならカリブレーション、カリフォルニア(キャリフォルニア)などの西海岸ならキャリブレーションと書くことになるだろう。笑)
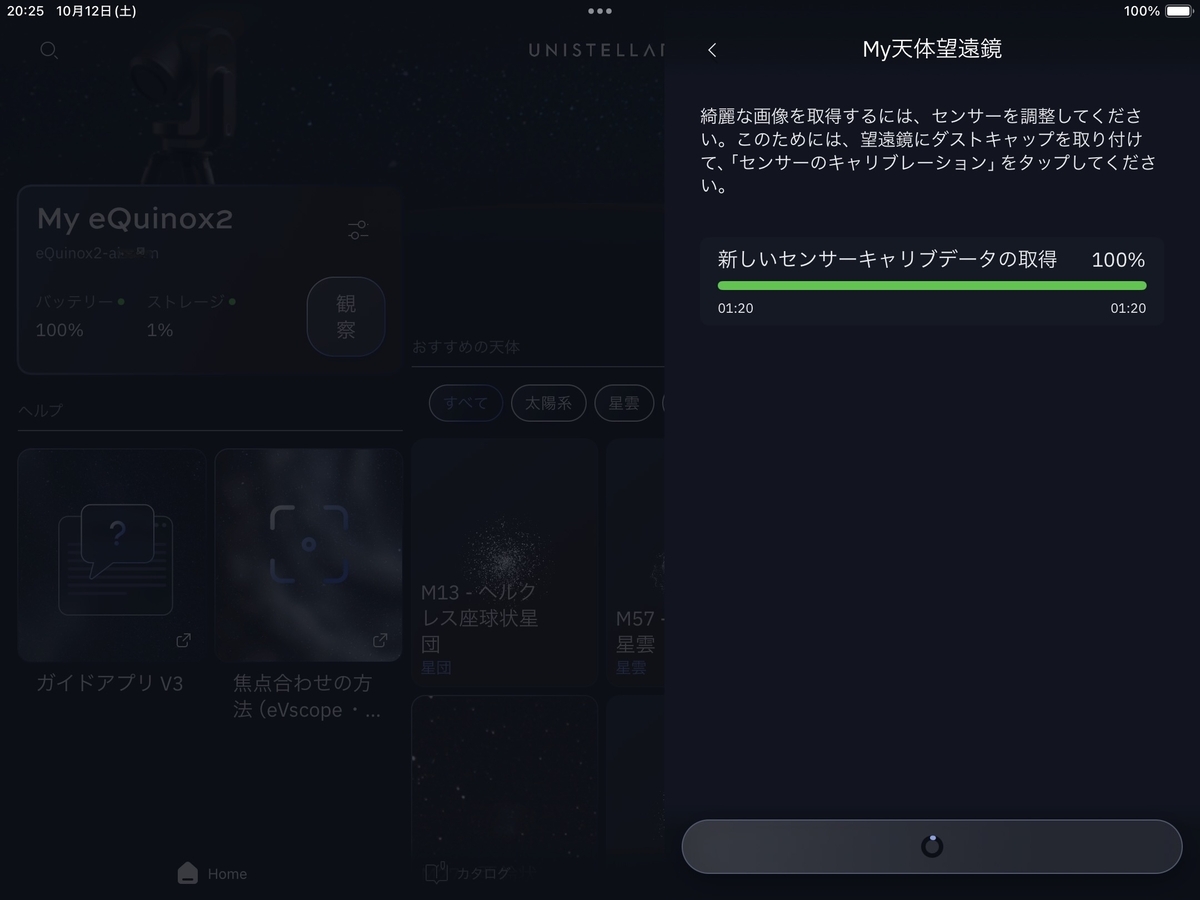
さて「較正」ボタンを押すことに成功すると(笑)、次のような画面に変わる。
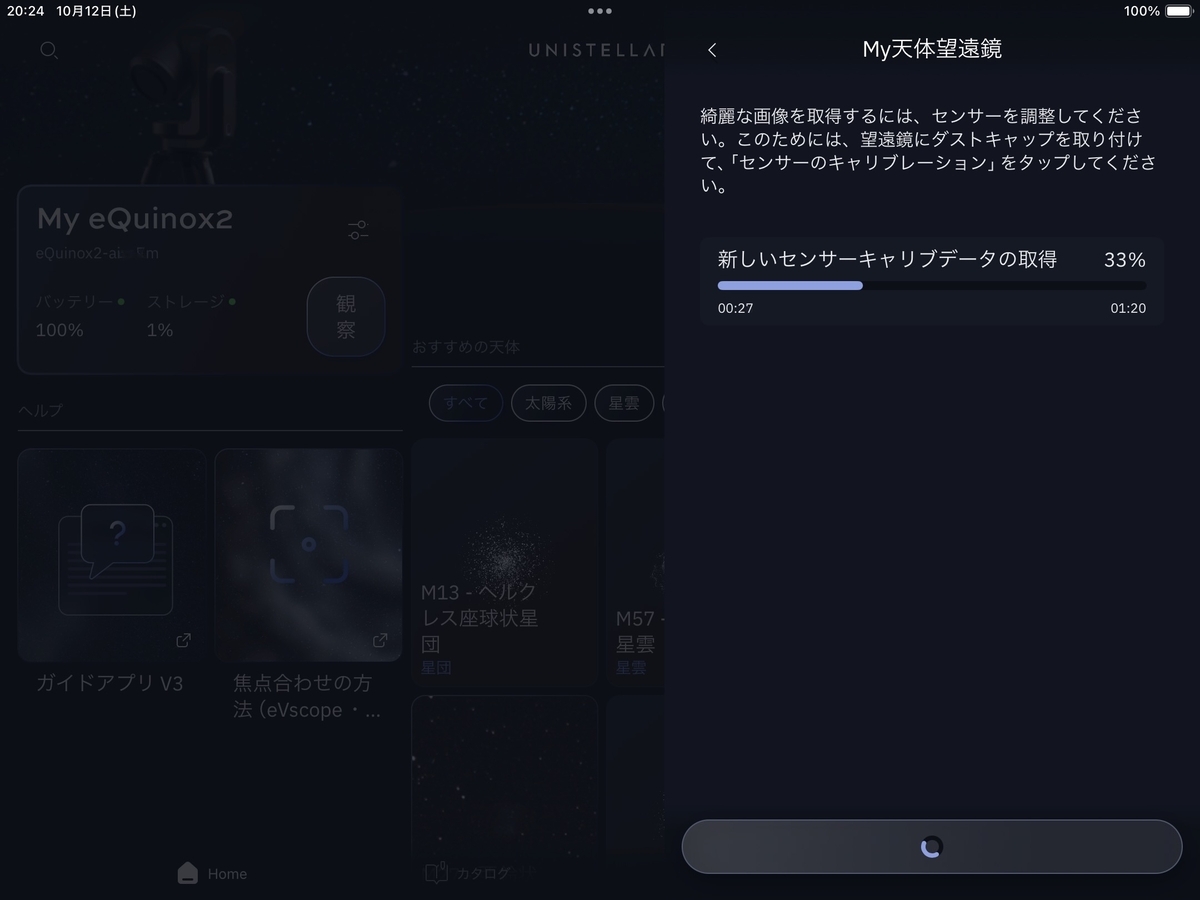
画像素子センサーの全体にわたって熱電流が流れていないかチェックしているのであろう。トータルで80秒かかると表示され、これはかなり正確である。80秒後にプロセスは終わり、ダークフレーム情報が取得される(センサーのカリブレーションが終了する)。
ここまでの設定/調整が室内で可能な作業である。しかし、室内でのダークフレーム取得はあくまで「練習」だと思ってやるべきだろう。なぜなら、室内と室外の気温差によって熱電流の強度が変わるからである(室内が暖かく、室外が寒い時は素子感度の抑制が効きすぎてしまうだろうし、その逆の状況だと抑制が弱くなりすぎるだろうから)。実際の屋外観測では必ず一回ダークフレームの取得をやるべきだろう。
画像素子:CCDとCMOSの違い
両者共に光電効果を利用した半導体デバイスであることに違いはない。違いがあるのは、光電流の検出の仕方である。CCDの場合はピクセル一つ一つから信号を取り出すことはしない。ピクセルの配置順に流作業的に順番に信号を取り出す。シーケンシャルファイルの読み出しやUNIXのコマンドのパイプのような感じである。一方で、CMOSの場合はピクセルごとに独立して信号を取り出すことができる。ランダムアクセスファイルや並列処理のような感じにイメージするのが近いのではないだろうか?SONYは数年前に世界の主流だったCCD方式を完全に放棄し、CMOSへと舵を切ったという。おそらくなにかしらの技術革新があってのことであろう。SONYのCMOS式画像素子はその後CCDを抜いて主流になったと思われる。
(2)バーティノフマスクによる焦点調整
次の調整はいわゆる「ピント合わせ」であるが、Unistellar eQuinox2の場合はバーティノフマスクで焦点調整をするのがデフォルトになっている。通常の望遠鏡では、この作業は「任意」である。
以前VixenのA80Mfで木星の大赤斑を撮影しようと思ったのだが、ピントがなかなか合わずうまく撮影できなかった。なにかよい方法がないものか調べたときに「バーティノフマスク」という道具が存在することを知ったのである。(プラスチック製のものをアマゾンに注文したら、割れた状態の不良品が配送され、その後すっかりやる気が失せてしまい挑戦を諦めてしまった)。

(なんとなくそんな感じがするが...)
Unistellarの望遠鏡にはバーティノフマスクが付属品としてデフォルトで付いてくる。期せずして諦めたことに再挑戦できることになった。 説明書にあるように、バーティノフマスクは鏡筒の蓋の裏側にくっついており、外して使う設計になっている。詳しい説明は(下の)Unistellarのyoutube動画を参考にするとよいのだが、この調整のエッセンスだけはここにメモ書きしておきたいと思う。
バーティノフマスクによる焦点調整をするために、まずは望遠鏡で明るい恒星をあらかじめ補足しておかねばならない。つまり、(本末転倒に聞こえるが)最初の観測を成功させないと先に進めないのである。したがって、ここからの調整は屋外でやらなくてはならない。もちろんピント調整がまだなので、たとえ恒星を捕捉したとしても、iPadに映し出される星の像はぶれている可能性が高い。しかし、それは気にする必要がない。大事なことは焦点があっていようといまいと、iPadのモニターに恒星らしき像を映し出すことである。
才能があれば、マニュアルで、つまり(iPadのアプリにあるバーチャルの)操作レバーを上手に操って望遠鏡を恒星の方向に向かせることができるかもしれない。しかし、そんなテクニックを持っていないからこそ、自動化したスマート望遠鏡を購入したわけである。ここは、eQuinox2の機能をフルに利用して自動調整で恒星を補足するに限る。
この作業は、通常の赤道儀における「極軸合わせ」に相当する。北極星を見つけ、その方向に赤道儀の回転軸の向きを合わせる作業である。これまでの望遠鏡では目視と手作業で行ってきたが、この設定で手を抜けば長時間露光による観測が失敗するのは必至である。つまり、天体観測の精度が決まる重要な調整作業なのである。プロの天体観測者はこの作業を一回一回の観測毎にやるのが大変なのを知っているので、(手作業で)一度正確に合わせた赤道儀の極軸調整が手に入れば、観測ドームを建設してその設定を恒久的に固定してしまう。このテーマの最初のブログ記事でも書いたが、スマート望遠鏡では、この大変な「極軸合わせ」の作業を自動でやってくれるからこそ価値があるのである。Unistellarならドームが不要なのである!
屋外でのダークフレームの調整が終わったら、鏡筒のカバーを外す。そして、アプリの設定セクションに入り、「オリエンテーション」を起動しよう(下の図を参照)。これが「極軸合わせ」の自動設定に相当するものである。

オリエンテーション(極軸合わせ)を実行すると、次のような画面となり、望遠鏡に映った星の分布パターンを認識しようとしているのがわかる。組み込まれた星図データと照合して、望遠鏡がどの方角を向いているのか計算するのである。これこそが「スマート望遠鏡」と呼ばれる理由である。
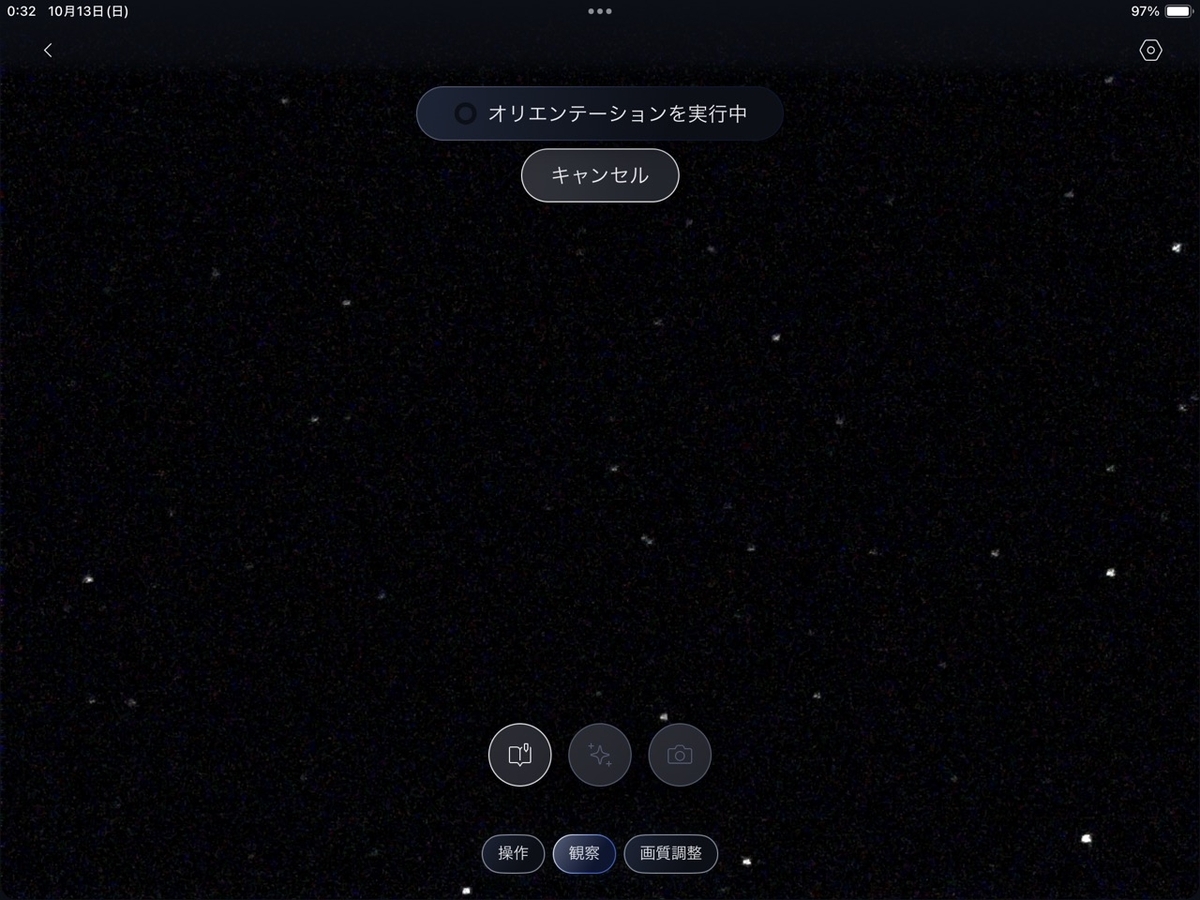
焦点は完全にはあっていないので、星の像は若干ブレ気味である。しかし、オリエンテーションでは「分布パターン」だけが重要なので、多少ぶれていても気にせずやり抜いてくれる。望遠鏡が勝手に動きだし、星のパターンが一致する方角を探し始める。しばらくすると静止するので、どうやらパターン認識に成功したらしいと感じる。間も無くして「オリエンテーションが完了した」というメッセージが現れ、極軸合わせは完了する!これまで極軸合わせには随分泣かされてきたので、この機能は本当にすごいと思う。
これでこの望遠鏡はシステムに登録してある恒星ならば、iPadのアプリで指定するだけで自動的にその星を探し出し、映し出してくれる。私は、この夜、真上に輝く夏の大三角の一つであるアルタイルを利用した。アプリのホーム画面に戻ると「おすすめの星」というのが出てくるので、そこにあったアルタイルを選んだだけの話である。ボタンを押すと、望遠鏡が勝手にアルタイルを探し始める。そして視野に星が入ったところで動きをやめ、自動追尾モードに移行する。地球の自転のために視野から星が外れることはない。ずっと、同じ場所に星が静止した状態で映し出されるのである!
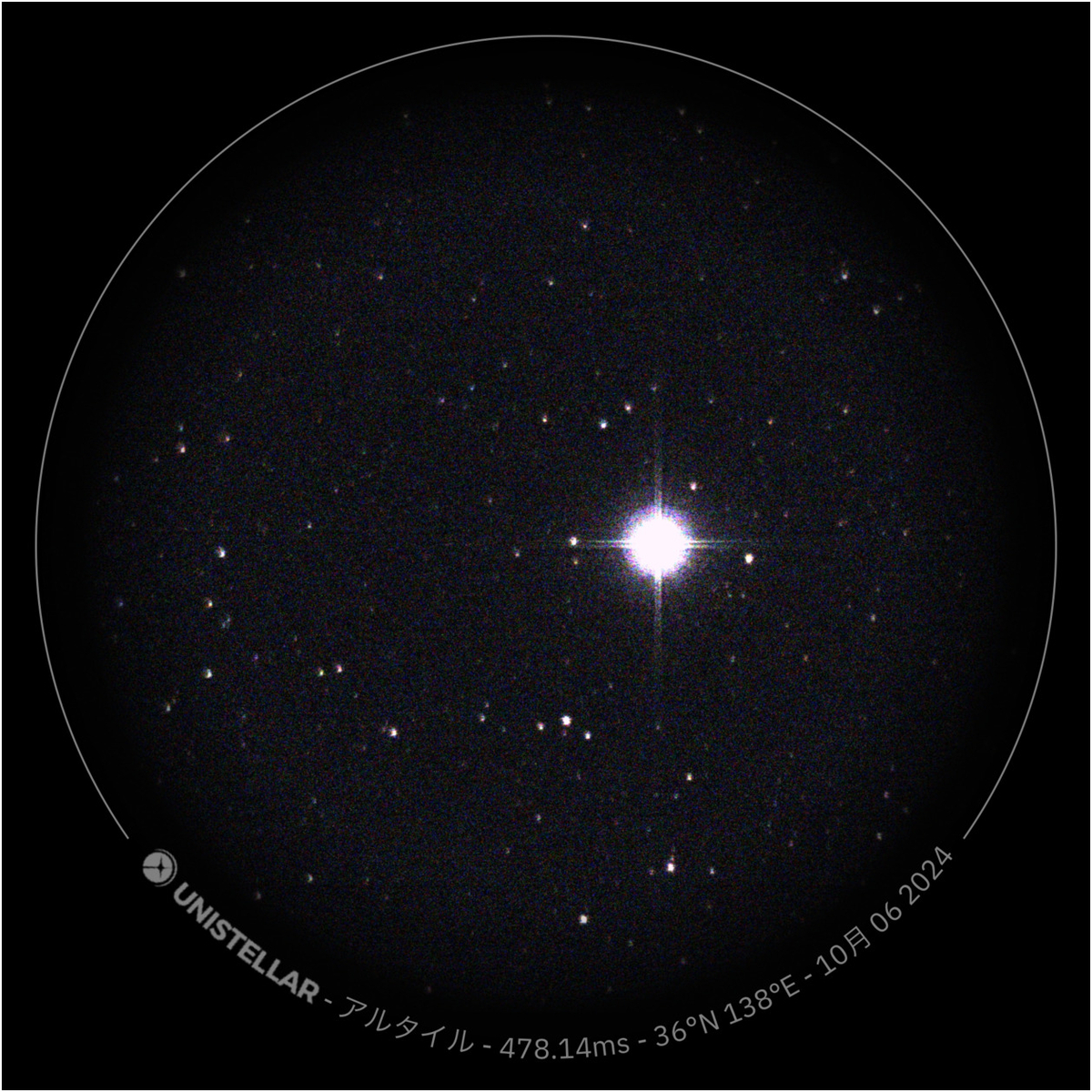
星の像に焦点があっておらず、若干滲んでいるのがわかる。これを調整するのがバーティノフマスクである。
ここで、蓋からバーティノフマスクを取り外して分離し、マスクだけを鏡筒に取り付ける。反射望遠鏡の入り口には十字型の「支柱」が取り付けてある(スパイダーというらしい)が、マスクの切り込みが十文字型のスパイダーの形状に合致するように回して調整すると、カチッとうまくハマる。無理に押し込むと壊れる可能性があるから気を付ける。

(実は私の場合、アルタイルの観測をした時はバーティノフマスクの使い方について習熟しておらず、翌日再度同じプロセスを辿ってやり直したのである。このブログの読者の皆さんには私の失敗を生かしてもらって、そのような無駄な時間をぜひ作らないようにしてもらいたいものである。ということで、翌日はアルタイルではなく、アルデバランを使って焦点調整を行うことになった。夜遅くまで雲がかかって観測できず、星空が出た時にはすでにアルタイルはすでに沈みかけていたのである...)
さて、自動導入で見つけた「若干ピンボケ」の恒星をモニターで見ながら、鏡筒にバーティノフマスクを丁寧に装着する。このとき、望遠鏡に手をぶつけたりして位置をずらしてしまうと、設定が極軸からずれてしまい、オリエンテーションのやり直しとなるから注意が必要である。
バーティノフマスクを装着して撮影したアルデバランが下の写真である。
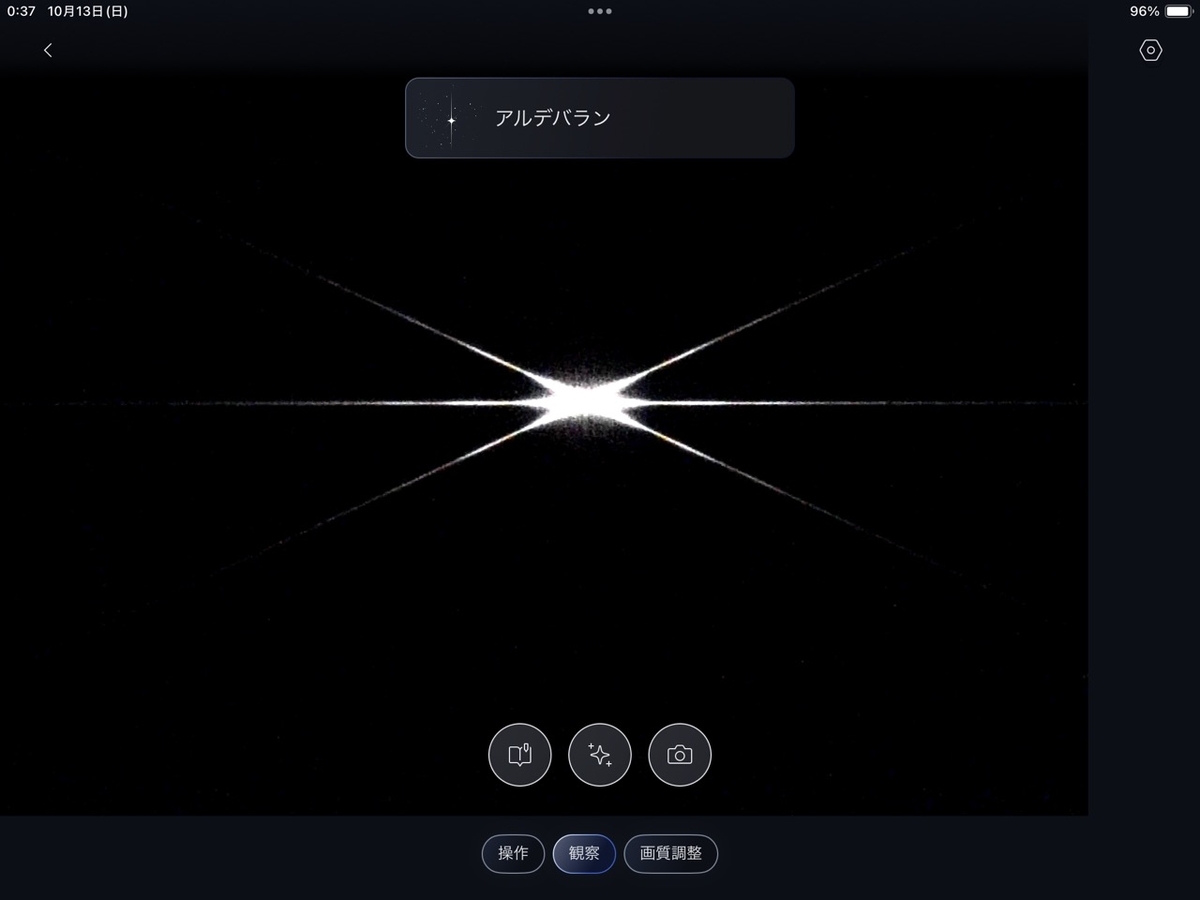
独特の干渉模様がマスクの隙間による回折像によって形成されている。光条の間隔が等しくなり、対称的な図形になるように、鏡筒の底にあるダイヤルを微調整しながら回す。この作業の説明はクイックスタートガイドの「焦点を合わせる」の箇所には図示されているが、テクニカルガイドの「ピント合わせ」には説明がほとんどない(「ホイールを回してピントを合わせろ」とあるが「ホイールって何?」と初心は感じるはずである)。「ホイール」の回し方については、実は上のyoutube動画での説明が一番丁寧である。少し面倒だが最後まで閲覧しておこう。
光条の対称性の調整は完全に目視判断となるので、「職人技」を身につけるまでは何度も微調整を繰り返すほかはないだろう。現在の私の全力は次の観測写真を見てもらって判断してもらいたい(笑ってもらって構わないです)。
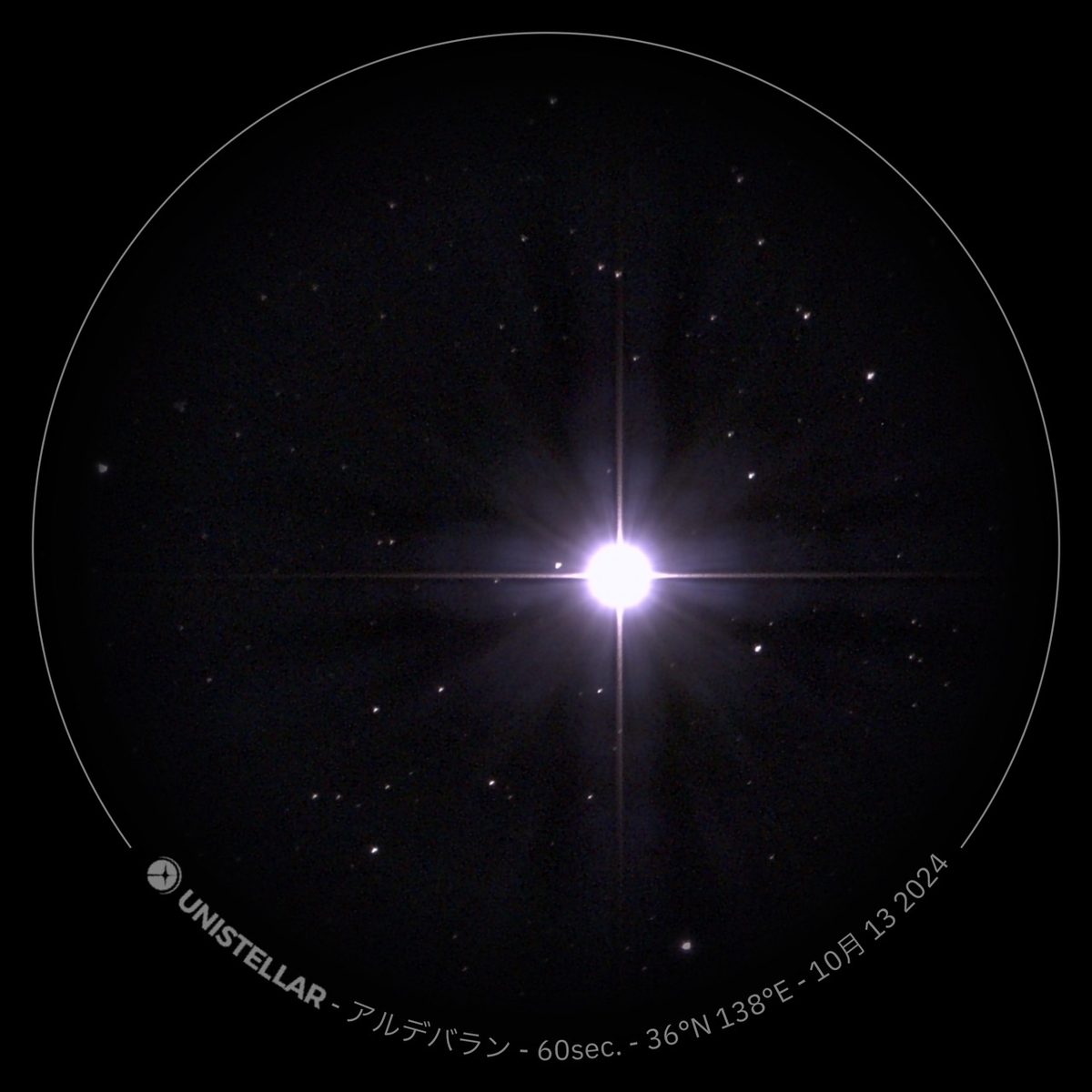
昨晩のアルタイルよりはマシだとは思うが、まだ滲みが残っている。本来は焦点合わせのプロセスに戻って再調整を繰り返さねばなるまい。しかし、今晩は練習だと割り切って、このまま観測を続けることにした。
ちなみに、星の像に十文字の光条が光っているが、これはスパイダーによって生じる回折像である。スパイダーの形状が歪むとこの回折像も歪むそうである。十文字が垂直になっていると「綺麗に」感じる人は、スパイダーが歪まないように注意した方が良いだろう。スパイダーは反射望遠鏡に特有の部品なので、屈折望遠鏡で観測し撮影した写真には、このような十文字の光条は写らない。
はくちょう座のアルビレオのような、接近した二重星を観測しようと思うと、このスパイダーの回折像が邪魔になる場合がある。その場合は干渉しないように紙や布などをスパイダーに巻いて干渉条件を殺してやればよいらしい。が、まだそこまで技術が到達していないので、この課題はいずれまた触れることにしよう。
(3)光軸合わせ
実は光軸合わせの調整は、焦点調整の作業の前にやるべきである。というのは、わざとピントをずらした星の像を利用するからである。せっかく焦点調整した設定を壊すことになるので、光軸合わせをやる場合は手順に気をつけて行ったほうがよいだろう。ただ、先に書いた通り、出荷状態では光軸が合わせてあるそうなので、それを信じて焦点合わせだけを今回は行った。
さて、光軸合わせを行う場合には、まず先ほどの「焦点ホイール」を反時計回りに目一杯回してわざとピントをずらす。星の像が、スパイダーの形に変形するので、それが綺麗な対称的な十文字なるまで、ホイールについている2つのネジをレンチで回すのである。詳しい説明は、テクニカルガイドに書いてあるのでそれに従って実施しよう。私はこの作業は自分自身ではまだ経験していないので、覚書程度にしてここでやめておこう。将来、光軸調整をやる機会が生じたら、そのときに報告したいと思う。
光軸調整が終わったら、バーティノフマスクを使って再度焦点調整を行う必要がある。ホイールが左に目一杯回されているので、ピントがずれているからだ。私はこれを知らず、(光軸調整の真似事を途中までやって)ホイールを回したまま観測を行ってしまった。たぶん30分ほどまともな像が出てこず時間を無駄にしたはずである。
初期設定完了
光軸合わせは一度やったらしばらくやらなくてよいそうであるが、得られた像がどうしても歪んでいて耐えられない時は実施しないといけない、とガイドブックに書いてある。
それとは対照的に、(1)ダークフレームの取得、(2)バーティノフマスクによる焦点調整、の2つの作業は観測する時は毎回、かならず一回は実施しなくてはならない。つまり「ルーチン」の設定であることを覚えておこう。
こうして、eQuinox2の設定が完了である。恒星は観測してもあまりおもしろくないが、二重星なら綺麗な場合もある。そこで物は試しとシリウスbを狙ってみたが残念ながら今回は映らなかった。やはりこの望遠鏡の一番の強みは淡い星雲や遠方銀河の観測であろう。次回はその観測方法について書いてみたい。